
Mako 机器人手臂辅助全膝关节置换术
Main Text
抽象
全膝关节置换术 (TKA) 已经存在了几十年,是一种非常成功的手术,可以减轻患有晚期退行性关节病的膝关节的疼痛并恢复功能。多年来,手术技术取得了许多进步,种植体设计更是如此。TKA 最近的技术突破之一是使用机器人辅助手臂通过动态关节平衡和骨骼准备来增强术前计划和术中指导。本视频文章概述了主要作者使用 Mako 机器人辅助在内翻畸形退行性膝关节中进行后路稳定 TKA 时使用的手术技术。
案例概述
背景
膝骨关节炎是一种退行性疾病,会导致关节软骨进行性丧失。有症状的膝骨关节炎的发病率约为每年每 100,000 人 240 人。危险因素包括关节外伤、需要反复弯曲膝关节的职业、肌肉无力、体重大、女性、年龄增加、遗传、种族(白>西班牙裔>非裔美国人)和代谢综合征(一种包括中枢性或腹部肥胖、血脂异常、高血压和空腹血糖水平升高的综合征)。关节软骨的病理生理变化包括含水量增加、胶原蛋白变得杂乱无章、蛋白多糖发生变化并最终数量减少,但软骨细胞的大小和数量保持不变。软骨下骨试图重塑,形成溶骨性囊肿伴周围硬化。骨赘也是通过软骨内骨化的病理激活形成的。滑膜经历进行性炎症变化,最终变得血管过多并越来越厚。
患者的重点病史
患者是一名 66 岁女性,有 2 年的左膝关节疼痛史,无损伤或外伤史。长时间行走、爬楼梯和长时间站立会加剧疼痛。尝试的治疗方法包括支具、抗炎口服药物、皮质类固醇注射和正式的物理治疗。她有高血压、高脂血症和焦虑症的既往病史。
体格检查
患者很舒适,外表良好,并且适应时间、地点和人物。她以止痛步态行走。对她的左下肢的检查显示,皮肤整个皮肤干净完整。大腿和腿部隔层很柔软。她的髋关节活动范围正常,没有疼痛。严重的是,她的膝盖处于轻度内翻畸形。有中度膝关节积液。她的膝关节活动范围从 0° 到 115° 屈曲。她的内侧关节线有压痛。她的膝关节韧带检查对前抽屉、Lachman、后抽屉以及内翻和外翻压力测试稳定。她的伸肌机构完好无损,直腿抬高时没有疼痛。她的远端神经血管完整。
影像学检查
在决定进行全膝关节置换术 (TKA) 之前要拍摄的重要 X 光片包括负重 AP、PA 屈曲、侧向和日出视图。一些外科医生还喜欢查看长腿对齐 X 线片。该患者的图像显示严重的退行性变化,内侧和髌股骨室关节空间丧失,伴有骨与骨接触、软骨下硬化和多发性关节周围骨赘。有轻微的内翻机械对线。髌骨在日出视图上集中跟踪。
此外,根据 Mako 协议进行了 CT 扫描,以便进行术前计划并允许 Mako 机器人进行准确的术中引导。CT 协议由 Mako 提供。
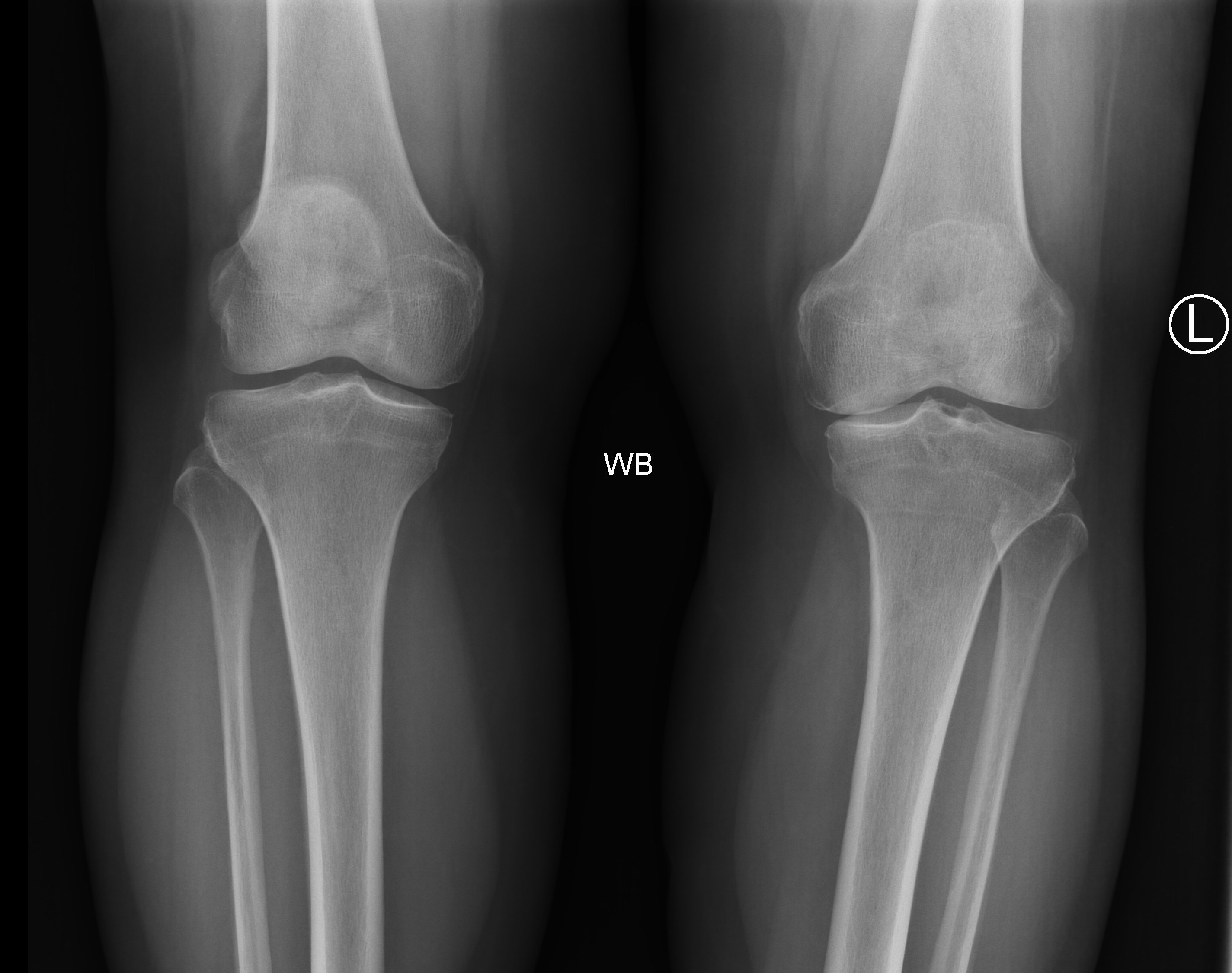
图 1a. 术前 AP X 光片显示患者左膝内翻畸形。
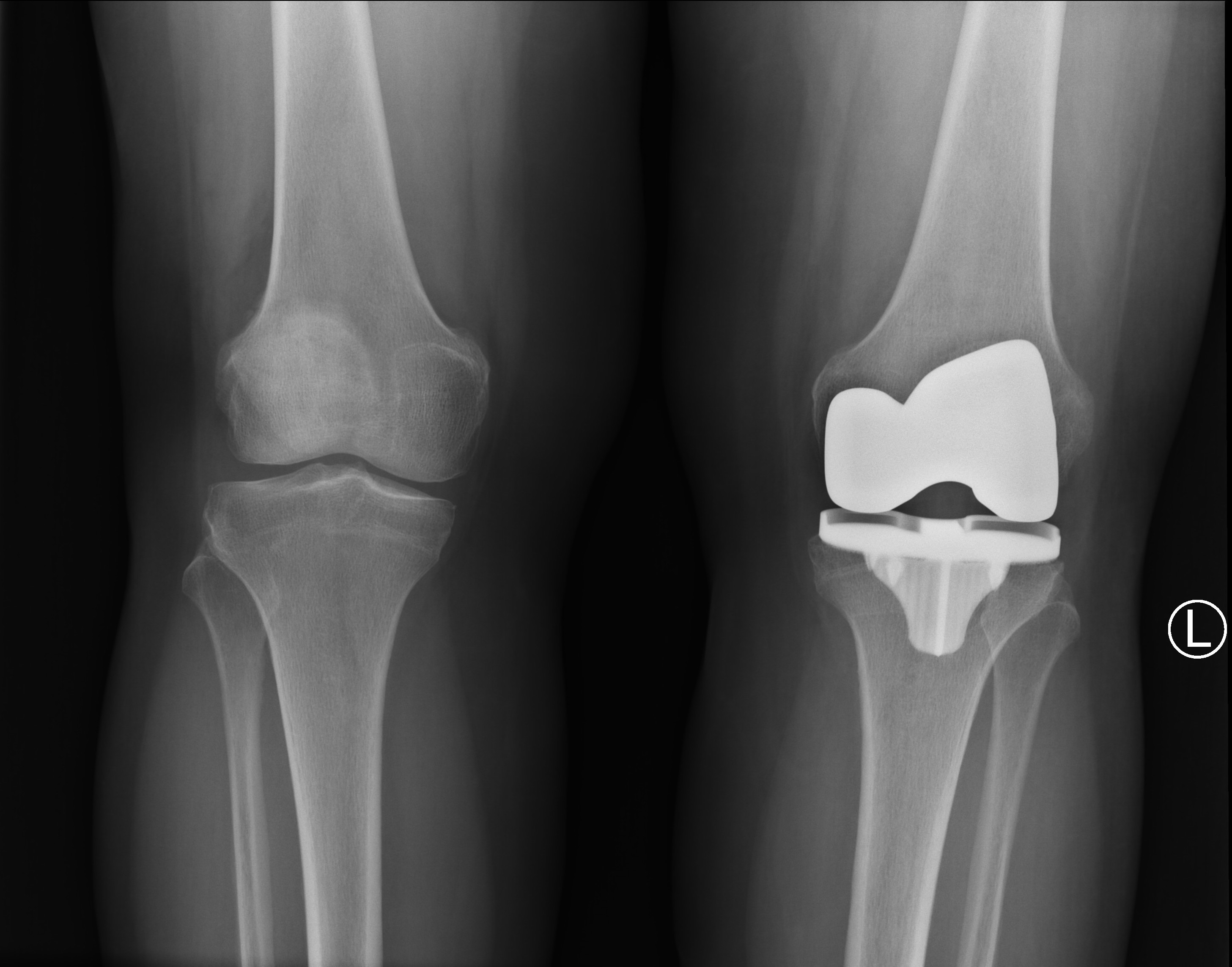
图 2a. 术后 AP X 线片显示正确的解剖轴恢复。
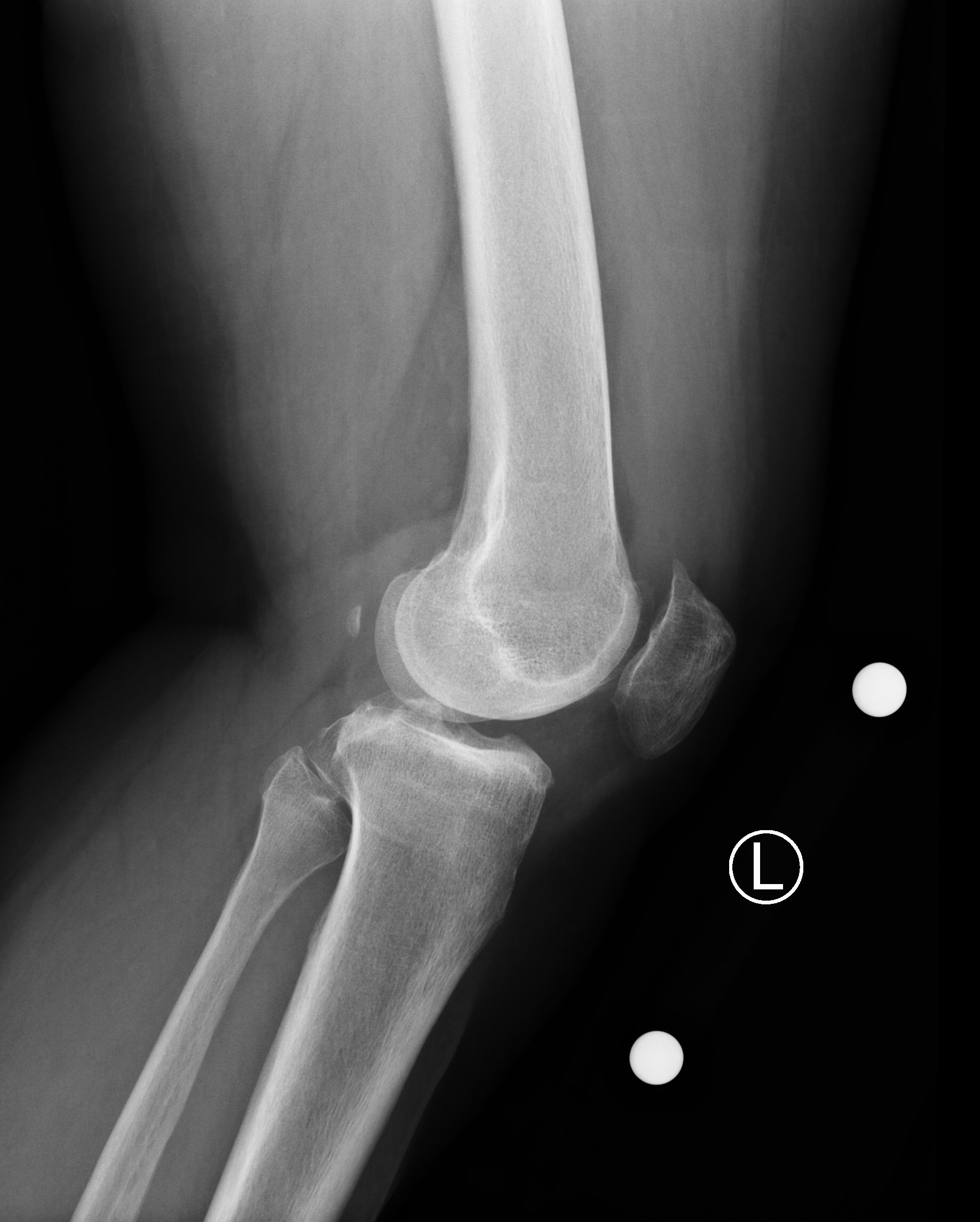
图 1b. 术前侧位 X 线片显示患者左膝内翻畸形。
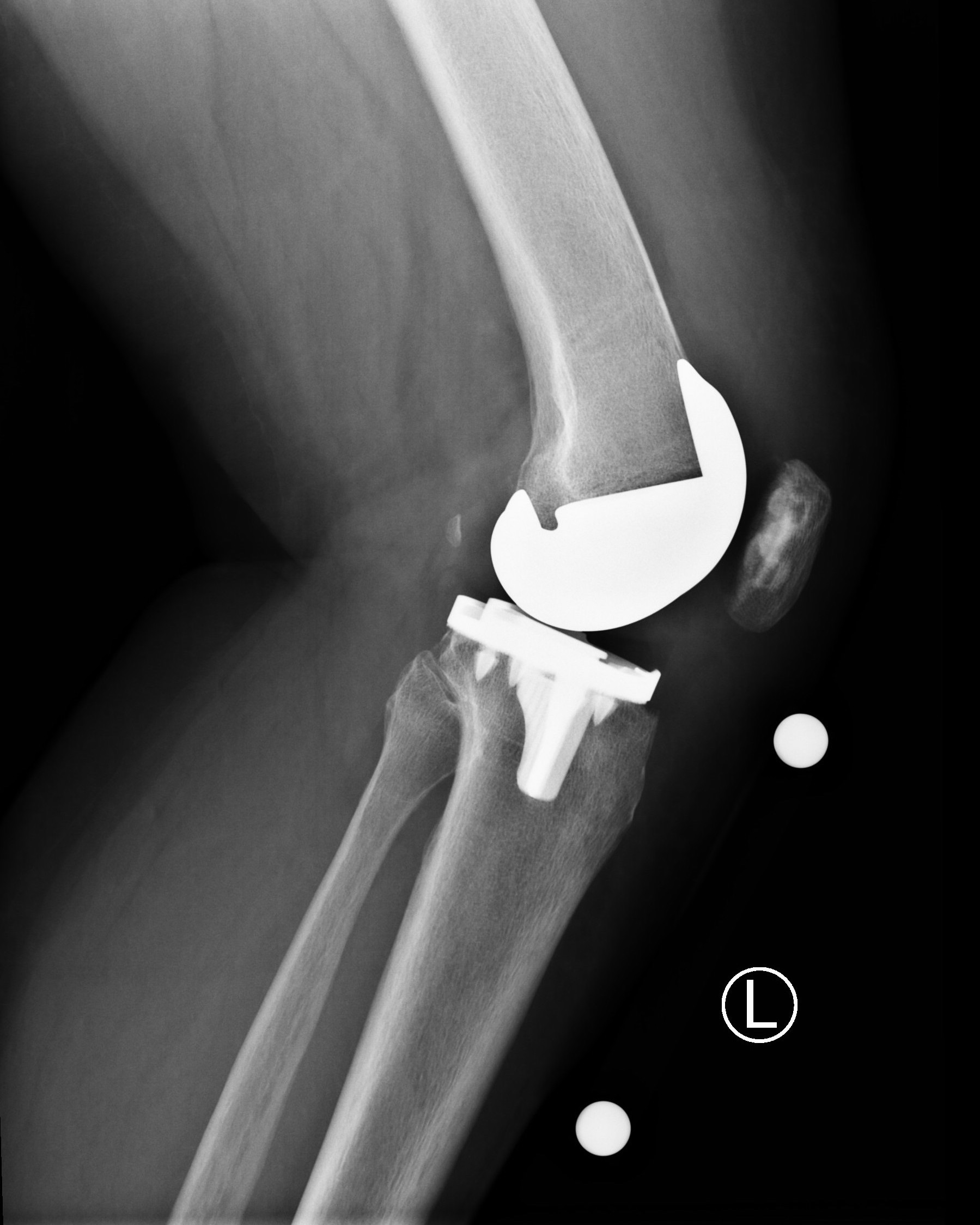
图 2b. 术后侧位 X 光片显示股骨和胫骨成分的适当对齐和尺寸。
自然史
骨关节炎的自然病程是进行性的,导致疼痛和残疾加剧。然而,症状进展的速度因患者而异。一般来说,这是一个缓慢的进展,症状在数月至数年内变得更加严重、频繁和虚弱。随着关节炎和畸形随着时间的推移而恶化,患者的功能(包括运动范围和行走能力)会下降。一些患者症状严重,在 X 线片上仅可见轻度疾病,而另一些患者几乎没有症状,放射学疾病严重。外科医生应治疗患者及其症状。
治疗方案
骨关节炎膝关节的治疗通常从非手术管理开始,包括活动调整,例如减少冲击负荷锻炼和减轻体重。非甾体抗炎药 (NSAIDs) 也是一线治疗。其他非手术治疗选择包括对乙酰氨基酚、物理治疗、皮质类固醇注射、支具以及使用辅助设备,如手杖或拐杖。通常为患有孤立性内侧或外侧骨筋膜室关节炎的年轻患者保留的手术选择是截骨术,以减轻受影响的骨筋膜室负担并纠正畸形。关节置换选择包括部分膝关节置换术和全膝关节置换术。关节置换术的风险和益处根据个人情况进行权衡。风险包括但不限于感染、出血、血栓、周围结构损伤、伤口愈合问题、腿长差异、不稳定、持续疼痛、僵硬、骨折以及需要进一步手术。
治疗依据
TKA 是一种成功的外科手术,可以可靠地缓解退行性关节病患者的疼痛并改善功能。患者表现为左膝关节退行性改变。她患有与活动相关的剧烈疼痛,并且影像学检查结果为中度至重度关节炎。她未能通过助行器、支具、物理治疗、注射和镇痛药物获得足够的功能或疼痛缓解。基于这些发现,并在与患者共同进行决策讨论(包括概述手术的风险)后,决定进行膝关节置换手术。
特别注意事项
Mako 机器人辅助 TKA 的患者选择在很大程度上取决于外科医生的判断。需要考虑的事项包括同侧髋关节的足够关节和活动范围,以完成骨骼注册;手术腿中存在金属,可能在 CT 扫描中产生伪影,从而降低准确性并对手术计划产生不利影响;以及外科医生对使用 Mako 的舒适度。目前,只有某些植入物与 Mako 机器人兼容,因此需要仔细考虑其他因素。它们包括影响植入物稳定性的骨质量差;软组织完整性差,无法用兼容的植入物恢复稳定的关节;以及膝关节整体畸形的类型和意义,包括屈曲挛缩和固定内翻/外翻对齐。
讨论
骨关节炎是最常见的关节疾病。据估计,60 岁以上的成年人中有 37.4% 有关节炎的影像学证据。1 根据美国人口普查局的数据,预计到 2030 年,全膝关节置换术的数量将增加 350 万例手术。阿拉伯数字
总的来说,TKA 在过去几十年中产生了出色的临床结果。3、4 尽管如此,仍有改进的余地。研究表明,高达 31.8% 的传统 TKA 的机械电轴错位超过 3%,而计算机辅助 TKA 的 9%。5 决定良好临床结果的最大因素之一是正确的组件放置。6、7 在一项尸体研究中,与传统 TKA 对照相比,Mako TKA 的平均最终骨切割和组件位置精确 5 倍和 3.1 倍。8 因此,机器人辅助全膝关节置换术 (RATKA) 可能会提高骨切割和组件放置的准确性。
在另一项尸体研究中,用于 RATKA 的 Mako 技术显示出良好的软组织保护,包括对 LCL、MCL、PCL 或髌骨肌腱没有损伤。这项研究还表明,在进行骨切割时,不需要胫骨半脱位和髌骨外翻来进行适当的可视化。9
尽管存在其他机器人辅助系统,但在本案例中,Stryker Mako 系统使用了 Stryker Triathlon 植入物。铁人三项全膝关节植入物在一项为期十年的随访研究中显示出 99% 的出色生存率。10 已经植入了超过 200 万个铁人三项膝关节,这表明它是一个可靠的系统,现在与 Mako 机器人辅助技术完全兼容。10
关节炎膝关节的广泛疾病和每个患者独特的解剖结构可能会给外科医生在进行 TKA 时带来挑战。RATKA 技术允许外科医生使用基于术前 3D CT 模板的实时反馈回路做出术中决策,该模板允许对骨切割和种植体放置进行小幅调整。机械臂技术(包括实时反馈)使外科医生能够在进行骨骼切割之前根据软组织张力来平衡关节。在一项单外科医生研究中,Marchand 等人 研究了 100 多个膝关节的术中平衡和骨切除数据。11 他们指出,所有术前计划都在术中进行调整,无论关节炎的程度或膝关节畸形的类型如何。术中调整能够在 97% 的膝关节屈曲和 100% 的膝关节伸展的内侧和外侧间隙之间实现 1 mm 的平衡。12 此外,大多数膝关节不需要软组织松解来保持平衡。12 在进行骨切割之前预测关节平衡和调整组件位置的能力导致了平衡切除技术,并增强了机器人辅助技术的精度。
决定 TKA 手术良好临床结果的另一个因素是使用适当的植入物尺寸。13 虽然并非总是必要的,但术前计划可以帮助估计合适的植入物尺寸。14 RATKA 技术基于术前 3D CT 模板,使外科医生能够准确预测植入物尺寸。Bhimani 等人 观察了 54 例连续接受 RATKA 的患者,这些患者使用 Mako RATKA 系统,该系统提供了术前植入物尺寸模板。术中根据避免股骨切迹、避免或尽量减少种植体悬垂以及最大化皮质接触等因素改变种植体尺寸。研究表明,该软件预测了 96% 的股骨成分和 89% 的胫骨成分的准确组件尺寸,并且没有模板的偏差超过 1 个尺寸。15 此外,股骨组件或胫骨组件上均未出现缺口或植入物悬垂的情况。15 其他研究表明,使用标准 X 光片进行植入物尺寸模板的准确率为 43.6% 至 68%,这解释了这种做法并不常见。16、17
与几乎所有新的手术技术一样,RATKA 也有一个学习曲线。Sodhi 等人 评估了 RATKA 的学习曲线,发现外科医生可以适应这项技术,以至于在几个月内不增加任何手术时间。18
一些研究报告称,与使用各种患者报告结果测量的常规手动 TKA 相比,RATKA 患者的平均疼痛评分显著降低,总体身体功能评分更高,患者满意度和临床结果更高,遗忘关节评分更低。19、20 元尽管需要对这项相对较新的技术进行具有长期结果和更大人群的研究,但早期临床结果是有希望的。
设备
该手术中使用的特殊设备包括 Stryker 的 Mako TKA 系统。
披露
我们没有什么可披露的。
同意声明
本视频文章中提到的患者已同意拍摄,并且知道信息和图像将在网上发布。
References
- Dillon CF, Rasch EK, Gu Q, Hirsch R. 美国膝骨关节炎的患病率:来自 1991-94 年第三次全国健康和营养检查调查的关节炎数据。 J 风湿醇。2006;33:2271-2279.
- AAOS 全膝关节和髋关节置换术预测 2030。 http://www.prnewswire.com/news-releases/total-knee-and-hip-replacement-surgery- projections-show-meteoricrise-by-2030-55519727.html。2019 年 9 月 17 日访问。
- Jauregui JJ、Cherian JJ、Pierce TP、Beaver WB、Issa K、Mont MA。全膝关节置换术后的长期生存率和临床结果。 J 关节置换术。2015;30:2164-6. doi:10.1016/j.arth.2015.05.052.
- 英格兰、威尔士、北爱尔兰和马恩岛国家联合登记处 (NJR)。第 13 份年度报告。网址: https://reports.njrcentre.org.uk/。2019 年 9 月 17 日访问。
- 计算机辅助手术和全膝关节置换术的旋转对准。在全膝关节置换术 2005 年(第 254-257 页)。施普林格,柏林,海德堡。
- Hernigou P, Deschamps G. 胫骨植入物的后斜和单髁膝关节置换术的结果。 J 骨关节外科 Am.2004 年 3 月;86(3):506-11. doi:10.2106/00004623-200403000-00007.
- Ulrich SD、Seyler TM、Bennett D 等人。全髋关节置换术:翻修的原因是什么? Int Orthop.2008;32:597-604. doi:10.1007/s00264-007-0364-3.
- Hampp EL、Chughtai M、Scholl LY 等人。与手动技术相比,机器人臂辅助全膝关节置换术表现出更高的计划准确性和精确度。 J 膝关节外科。2019;32:239-50. doi:10.1055/s-0038-1641729.
- Bukowski BR、Anderson P、Khlopas A、Chughtai M、Mont MA。与手动全髋关节置换术相比,机器人手术的功能结局得到改善。 外科技术国际2016;29:303-8.
- Mistry JB, Elmallah RK, Chughtai M, Oktem ME, Harwin S, Mont M. 单桡骨全膝关节置换术的长期生存率和临床结果。 外科技术国际2016;28:247-51.
- Marchand RC, Bhowmik-Stoker M, Scholl L, Rodriquez L. 机器人手臂辅助全膝关节置换术的平衡切除手术技术。AOA 年会,2017 年 10 月 8 日至 12 日,澳大利亚阿德莱德。
- Marchand R, Bhowmik-Stoker M, School L, Rodriquez L. 机器人辅助全膝关节置换术的平衡切除手术技术。摘要 AOA 年会,2017 年 10 月 8 日至 12 日,澳大利亚阿德莱德。
- 冈萨雷斯 MH,梅哈伊尔 AO。失败的全膝关节置换术:评估和病因。 J Am Acad 骨科外科。2004;12:436–46. doi:10.5435/00124635-200411000-00008.
- Hernandez-Vaquero D, Abat F, Sarasquete J, Monllau JC.全膝关节置换术中标准化模板术前测量的可靠性。 世界 J 骨科。2013;4:287-90. doi:10.5312/wjo.v4.i4.287.
- Bhimani S, Bhimani R, Feher A, Malkani A. 使用 3D 预规划软件进行机器人辅助全膝关节置换术前植入物尺寸的准确性。机管局 2017 年年会。2017 年 11 月 2 日至 5 日。德克萨斯州达拉斯。
- Ettiger M、Claassen L、Paes P、Calliess T. 全膝关节置换术中的 2D 与 3D 模板。 膝盖。2016;23:149-151. doi:10.1016/j.knee.2015.08.014.
- Trickett RW、Hodgson P、Forster MC、Robertson A.全膝关节置换术中数字模板的可靠性和准确性。 J 骨关节外科 Br.2009;9:903-6. doi:10.1302/0301-620X.91B7.21476.
- Sodhi N、Khlopas A、Piuzzi NS 等人。与机器人全膝关节置换术相关的学习曲线。 J 膝关节外科。2018;31:017-21. doi:10.1055/s-0037-1608809.
- Marchand RC、Sodhi N、Khlopas A 等人。机器人手臂辅助全膝关节置换术后患者满意度结果:短期评估。 J 膝关节外科。2017;30:849-853. doi:10.1055/s-0037-1607450.
- Clark G. 澳大利亚体验 Mako 机器人 TKA。AOA 年会,2017 年 10 月 8 日至 12 日,阿德莱德。
Cite this article
Zarin JS, Barrazueta G. Mako 机器人手臂辅助全膝关节置换术。 J Med Insight. 2023;2023(214). doi:10.24296/jomi/214.

