
माको रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी
Main Text
Table of Contents
सारांश
टोटल नी आर्थ्रोप्लास्टी (टीकेए) दशकों से है और उन्नत अपक्षयी संयुक्त रोग वाले घुटने में दर्द को कम करने और कार्य को बहाल करने के लिए एक बहुत ही सफल प्रक्रिया के रूप में कार्य करता है। इन वर्षों में, शल्य चिकित्सा तकनीक में कई प्रगति हुई है और इम्प्लांट डिजाइन में और भी अधिक। टीकेए में हाल ही में तकनीकी सफलताओं में से एक गतिशील संयुक्त संतुलन और हड्डी की तैयारी के साथ प्रीऑपरेटिव प्लानिंग और इंट्राऑपरेटिव मार्गदर्शन को बढ़ाने के लिए रोबोटिक-असिस्टेड आर्म का उपयोग है। यह वीडियो लेख माको रोबोटिक सहायता का उपयोग करके एक वरस विकृति अपक्षयी घुटने में एक पश्चवर्ती स्थिर करने वाले टीकेए के प्रदर्शन में प्राथमिक लेखक द्वारा उपयोग की जाने वाली ऑपरेटिव तकनीक को रेखांकित करता है।
मामले का अवलोकन
पृष्ठभूमि
घुटने के पुराने ऑस्टियोआर्थराइटिस एक अपक्षयी बीमारी है जो आर्टिकुलर कार्टिलेज के प्रगतिशील नुकसान का कारण बनती है। रोगसूचक घुटने के पुराने ऑस्टियोआर्थराइटिस की घटना प्रति वर्ष प्रति 100,000 में लगभग 240 है। जोखिम कारकों में आर्टिकुलर आघात, दोहराए जाने वाले घुटने के झुकने की आवश्यकता वाला व्यवसाय, मांसपेशियों की कमजोरी, बड़े शरीर द्रव्यमान, महिला लिंग, बढ़ी हुई उम्र, आनुवंशिकी, जाति (सफेद > हिस्पैनिक > अफ्रीकी अमेरिकी), और चयापचय सिंड्रोम (केंद्रीय या पेट के मोटापे, डिस्लिपिडेमिया, उच्च रक्तचाप और ऊंचा उपवास ग्लूकोज के स्तर से युक्त एक सिंड्रोम) शामिल हैं। आर्टिकुलर कार्टिलेज में पैथोफिजियोलॉजिकल परिवर्तनों में पानी की मात्रा में वृद्धि शामिल है, कोलेजन अव्यवस्थित हो जाता है, प्रोटिओग्लाइकेन्स बदल जाते हैं और अंततः मात्रा में कम हो जाते हैं, लेकिन चोंड्रोसाइट्स आकार और संख्या समान रहती है। सबकॉन्ड्रल हड्डी फिर से तैयार करने का प्रयास करती है, आसपास के स्केलेरोसिस के साथ लिटिक अल्सर बनाती है। बोनी ओस्टियोफाइट्स भी एंडोकॉन्ड्रल ओसिफिकेशन के पैथोलॉजिकल सक्रियण के माध्यम से बनते हैं। सिनोवियम प्रगतिशील भड़काऊ परिवर्तनों से गुजरता है, अंततः हाइपरवैस्कुलर और तेजी से मोटा हो जाता है।
रोगी का केंद्रित इतिहास
रोगी एक 66 वर्षीय महिला है जो चोट या आघात के इतिहास के बिना बाएं घुटने के दर्द के 2 साल के इतिहास के साथ प्रस्तुत करती है। दर्द लंबे समय तक अनुकरण, सीढ़ियों पर चढ़ने और लंबे समय तक खड़े रहने से बढ़ जाता है। आजमाए गए उपचारों में ब्रेसिंग, विरोधी भड़काऊ मौखिक दवाएं, अच्छी अस्थायी राहत के साथ कॉर्टिकोस्टेरॉइड इंजेक्शन और औपचारिक भौतिक चिकित्सा शामिल हैं। उसके पास उच्च रक्तचाप, हाइपरलिपिडिमिया और चिंता का पिछला चिकित्सा इतिहास है।
शारीरिक परीक्षा
रोगी आरामदायक, अच्छी तरह से दिखाई देने वाला और समय, स्थान और व्यक्ति के लिए उन्मुख था। वह एक एंटाल्जिक चाल के साथ घुलमिल गई। उसके बाएं निचले छोर की जांच से पता चला कि त्वचा साफ और बरकरार थी। जांघ और पैर के डिब्बे नरम थे। उसे दर्द के बिना गति की एक सामान्य कूल्हे की सीमा थी। मोटे तौर पर, उसके घुटने हल्के वरस विकृति में थे। एक मध्यम घुटने का बहाव था। उसके घुटने की गति 0 ° से 115 ° तक फ्लेक्सन थी। उसे औसत दर्जे की संयुक्त रेखा पर कोमलता थी। उसके घुटने की लिगामेंट परीक्षा पूर्ववर्ती दराज, लाचमैन, पश्चवर्ती दराज, और वरस और वाल्गस तनाव परीक्षण के लिए स्थिर थी। उसका एक्सटेंसर तंत्र बरकरार था, और उसे सीधे पैर उठाने के साथ कोई दर्द नहीं था। वह न्यूरोवास्कुलर रूप से दूर से बरकरार थी।
इमेजिंग अध्ययन
कुल घुटने के आर्थ्रोप्लास्टी (टीकेए) के साथ आगे बढ़ने का निर्णय लेने से पहले महत्वपूर्ण रेडियोग्राफी में वजन-असर एपी, पीए फ्लेक्सन, पार्श्व और सूर्योदय दृश्य शामिल हैं। कुछ सर्जन लंबे पैर संरेखण रेडियोग्राफ की समीक्षा करना भी पसंद करते हैं। इस रोगी के लिए छवियों ने हड्डी-पर-हड्डी संपर्क, सबकॉन्ड्रल स्केलेरोसिस और मल्टीपल पेरिआर्टिकुलर ओस्टियोफाइट्स के साथ मेडियल और पेटेलोफेमोरल डिब्बे में संयुक्त स्थान के नुकसान के साथ गंभीर अपक्षयी परिवर्तनों का खुलासा किया। हल्के वरस यांत्रिक संरेखण था। पटेला सूर्योदय के दृश्य पर केंद्रीय रूप से ट्रैक कर रहा था।
इसके अतिरिक्त, प्रीऑपरेटिव प्लानिंग करने और माको रोबोट को सटीक इंट्राऑपरेटिव मार्गदर्शन करने की अनुमति देने के लिए माको प्रोटोकॉल के अनुसार एक सीटी स्कैन प्राप्त किया गया था। सीटी प्रोटोकॉल माको द्वारा प्रदान किया जाता है।
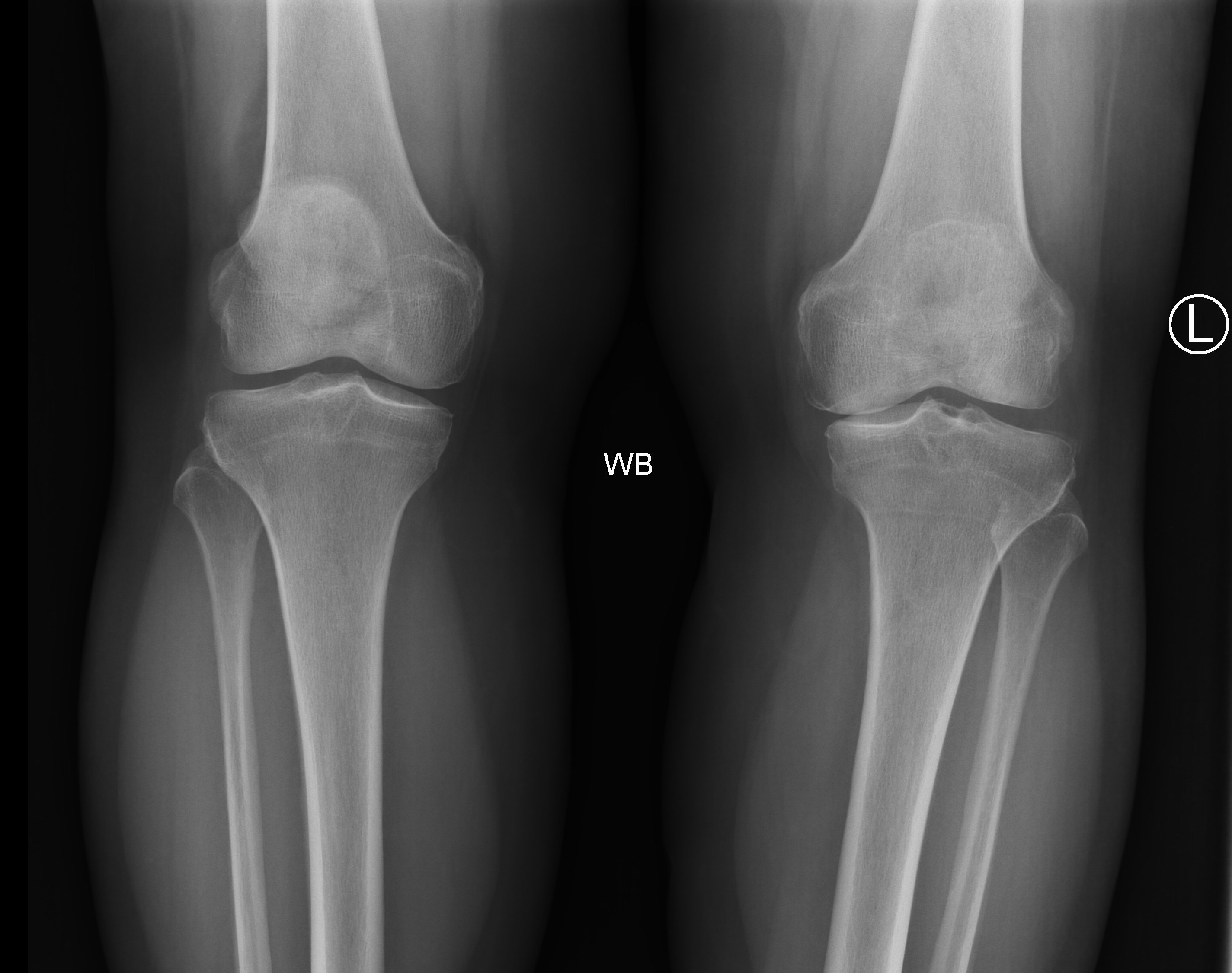
चित्र 1a. प्रीऑपरेटिव एपी रेडियोग्राफी रोगी के बाएं घुटने में वरस विकृति दिखाती है।
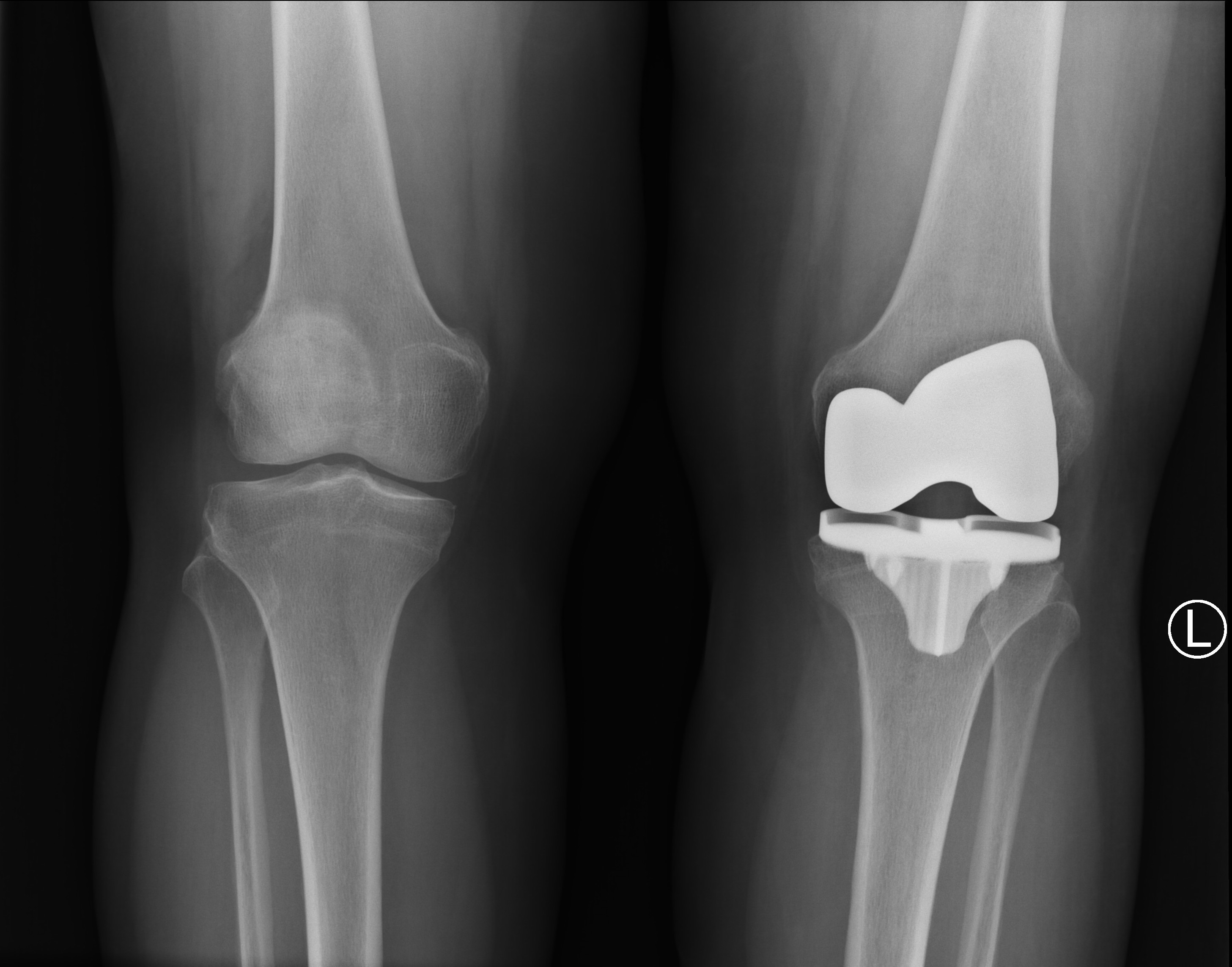
चित्र 2a. पोस्टऑपरेटिव एपी रेडियोग्राफ उचित शारीरिक अक्ष की बहाली दिखा रहा है।
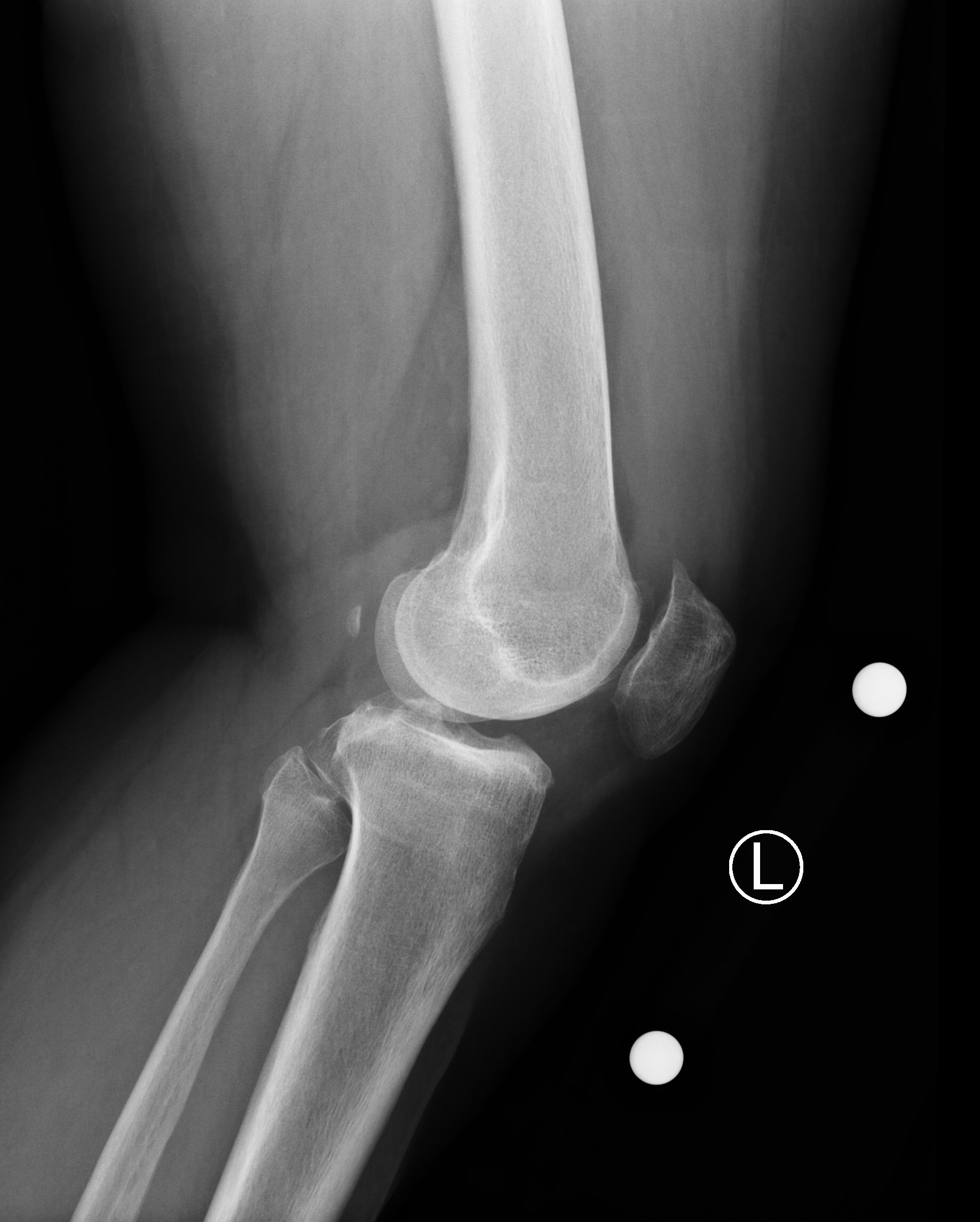
चित्र 1b. प्रीऑपरेटिव लेटरल रेडियोग्राफी रोगी के बाएं घुटने में वरस विकृति दिखाती है।
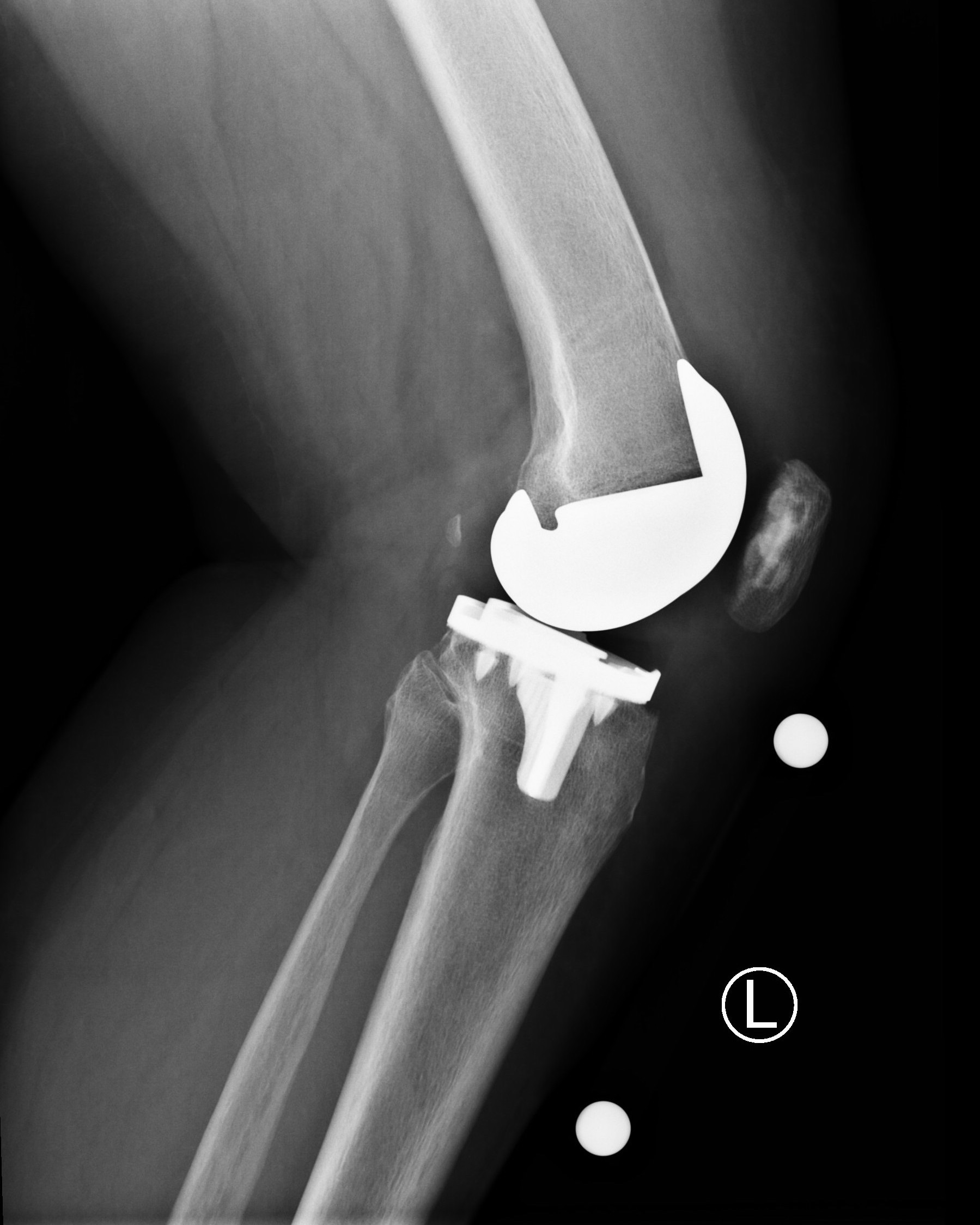
चित्र 2b. पोस्टऑपरेटिव पार्श्व रेडियोग्राफ ऊरु और टिबियल घटकों के उचित संरेखण और आकार को दर्शाता है।
प्राकृतिक इतिहास
पुराने ऑस्टियोआर्थराइटिस का प्राकृतिक इतिहास प्रगतिशील है, जिससे दर्द और विकलांगता बढ़ रही है। हालांकि, रोगसूचक प्रगति की दर रोगी से रोगी में परिवर्तनशील है। सामान्य तौर पर, यह एक धीमी प्रगति है जहां लक्षण महीनों से वर्षों तक अधिक गंभीर, लगातार और दुर्बल हो जाते हैं। चूंकि गठिया और विकृति समय के साथ खराब हो जाती है, इसलिए रोगियों को गति की सीमा और परिक्रमा करने की क्षमता सहित उनके कार्य में गिरावट का अनुभव होता है। कुछ रोगियों में रेडियोग्राफ़ पर केवल हल्के रोग के साथ गंभीर लक्षण होते हैं, जबकि अन्य में गंभीर रेडियोग्राफिक रोग के साथ कोई लक्षण नहीं होते हैं। सर्जनों को रोगी और उसके लक्षणों का इलाज करना चाहिए।
उपचार के लिए विकल्प
ऑस्टियोआर्थ्रिटिक घुटनों के लिए उपचार आमतौर पर गैर-ऑपरेटिव प्रबंधन के साथ शुरू होता है जिसमें गतिविधि संशोधन शामिल होता है जैसे कि प्रभाव लोडिंग अभ्यास को कम करना और वजन कम करना। नॉनस्टेरॉइडल एंटी-इंफ्लेमेटरी ड्रग्स (एनएसएआईडी) भी पहली पंक्ति के उपचार हैं। अन्य गैर-ऑपरेटिव उपचार विकल्पों में एसिटामिनोफेन, भौतिक चिकित्सा, कॉर्टिकोस्टेरॉइड इंजेक्शन, ब्रेसिंग और एक सहायक उपकरण जैसे बेंत या बैसाखी का उपयोग शामिल है। एक सर्जिकल विकल्प जो आमतौर पर पृथक मेडियल या लेटरल कम्पार्टमेंट गठिया वाले युवा रोगियों के लिए आरक्षित होता है, प्रभावित डिब्बे को ऑफ-लोड करने और विकृति को सही करने के लिए एक ऑस्टियोटॉमी है। संयुक्त प्रतिस्थापन विकल्पों में आंशिक घुटने का प्रतिस्थापन और कुल घुटने का प्रतिस्थापन शामिल है। आर्थ्रोप्लास्टी के जोखिम और लाभ व्यक्तिगत आधार पर तौले जाते हैं। जोखिम ों में शामिल हैं, लेकिन संक्रमण, रक्तस्राव, रक्त के थक्के, आसपास की संरचनाओं को नुकसान, घाव भरने के मुद्दे, पैर की लंबाई विसंगति, अस्थिरता, निरंतर दर्द, कठोरता, फ्रैक्चर और आगे की सर्जरी की आवश्यकता शामिल हैं।
उपचार के लिए तर्क
टीकेए एक सफल शल्य चिकित्सा प्रक्रिया है जो मज़बूती से अपक्षयी संयुक्त रोग वाले रोगियों में दर्द से राहत और बेहतर कार्य प्रदान करती है। रोगी को बाएं घुटने के अपक्षयी परिवर्तनों के साथ प्रस्तुत किया गया। उसे मध्यम से गंभीर गठिया की गतिविधि और रेडियोग्राफिक निष्कर्षों से जुड़ा गंभीर दर्द था। वह चलने वाले एड्स, ब्रेसिंग, भौतिक चिकित्सा, इंजेक्शन और एनाल्जेसिक दवाओं के साथ पर्याप्त कार्य या दर्द से राहत प्राप्त करने में विफल रही थी। इन निष्कर्षों के आधार पर और रोगी के साथ एक साझा निर्णय चर्चा के बाद जिसमें प्रक्रिया के जोखिमों को रेखांकित करना शामिल था, घुटने की प्रतिस्थापन सर्जरी के साथ आगे बढ़ने का निर्णय लिया गया था।
विशेष विचार
माको रोबोट-सहायता प्राप्त टीकेए के लिए रोगी का चयन काफी हद तक सर्जन के निर्णय पर निर्भर करता है। विचार करने वाली चीजों में हड्डी पंजीकरण को पूरा करने के लिए निचले कूल्हे की पर्याप्त अभिव्यक्ति और गति की सीमा शामिल है; ऑपरेटिव पैर में धातु की उपस्थिति, संभवतः सीटी स्कैन में कलाकृतियों का निर्माण करना जो सटीकता को कम कर सकता है और ऑपरेटिव योजना पर प्रतिकूल प्रभाव डाल सकता है; और माको का उपयोग करने के साथ सर्जन का आराम स्तर। इस समय, केवल कुछ प्रत्यारोपण माको रोबोट के साथ संगत हैं, इसलिए अतिरिक्त कारकों पर सावधानीपूर्वक विचार करने की आवश्यकता है। उनमें प्रत्यारोपण की स्थिरता को प्रभावित करने वाली खराब हड्डी की गुणवत्ता शामिल है; खराब नरम ऊतक अखंडता संगत प्रत्यारोपण के साथ एक स्थिर जोड़ की बहाली को रोकती है; और घुटने में समग्र विकृति का प्रकार और महत्व, जिसमें फ्लेक्सन कॉन्ट्रैक्टर्स और फिक्स्ड वरस / वाल्गस संरेखण शामिल हैं।
चर्चा
ऑस्टियोआर्थराइटिस सबसे आम संयुक्त रोग है। 60 वर्ष से अधिक आयु के अनुमानित 37.4% वयस्कों में गठिया के रेडियोग्राफिक सबूत हैं। अमेरिकी जनगणना ब्यूरो के अनुसार, कुल घुटने के प्रतिस्थापन की अनुमानित संख्या में 2030 तक 3.5 मिलियन सर्जरी की वृद्धि होने का अनुमान है। 2
टीकेए, सामान्य तौर पर, पिछले कुछ दशकों में उत्कृष्ट नैदानिक परिणाम उत्पन्न किए हैं। 3, 4 फिर भी, सुधार के लिए जगह है। अध्ययनों से पता चलता है कि पारंपरिक टीकेए के 31.8% बनाम कंप्यूटर-सहायता प्राप्त टीकेए के 9% में 3 डिग्री से अधिक की यांत्रिक अक्ष विकृति है। अच्छे नैदानिक परिणामों को निर्धारित करने वाले सबसे बड़े कारकों में से एक उचित घटक प्लेसमेंट है। 6, 7 एक कैडवेरिक अध्ययन में, पारंपरिक टीकेए नियंत्रणों की तुलना में माको टीकेए के साथ औसत अंतिम हड्डी की कटौती और घटक की स्थिति 5 और 3.1 गुना अधिक सटीक थी। 8 इसलिए, रोबोटिक-असिस्टेड टोटल नी आर्थ्रोप्लास्टी (आरएटीकेए) हड्डी में कटौती और घटक प्लेसमेंट की सटीकता में वृद्धि कर सकता है।
एक अन्य कैडवेरिक अध्ययन में, आरएटीकेए के लिए माको तकनीक ने अच्छी नरम ऊतक सुरक्षा का प्रदर्शन किया, जिसमें एलसीएल, एमसीएल, पीसीएल, या पेटेला कण्डरा को कोई चोट नहीं लगी। इस अध्ययन से यह भी पता चला है कि हड्डी में कटौती करते समय उचित विज़ुअलाइज़ेशन के लिए टिबियल सबलक्सेशन और पेटेलर एवर्सन की आवश्यकता नहीं थी। 9
यद्यपि अन्य रोबोट सहायता प्राप्त प्रणालियां मौजूद हैं, स्ट्राइकर माको प्रणाली का उपयोग स्ट्राइकर ट्रायथलॉन प्रत्यारोपण के साथ इस मामले की प्रस्तुति में किया गया था। ट्रायथलॉन कुल घुटने के प्रत्यारोपण ने दस साल के अनुवर्ती अध्ययन में 99% की उत्कृष्ट उत्तरजीविता का प्रदर्शन किया है। 2 मिलियन से अधिक ट्रायथलॉन घुटनों को प्रत्यारोपित किया गया है, यह दर्शाता है कि यह एक विश्वसनीय प्रणाली है जो अब माको रोबोटिक-सहायता प्राप्त तकनीक के साथ पूरी तरह से संगत है। 10
गठिया घुटनों में बीमारी का व्यापक स्पेक्ट्रम और हर रोगी की अनूठी शारीरिक रचना टीकेए करने में सर्जन के लिए चुनौतियां पेश कर सकती है। आरएटीकेए तकनीक सर्जन को प्रीऑपरेटिव 3 डी सीटी-आधारित टेमप्लेटिंग के आधार पर लाइव फीडबैक लूप का उपयोग करके इंट्राऑपरेटिव निर्णय लेने की अनुमति देती है जो हड्डी के कट और इम्प्लांट प्लेसमेंट में छोटे समायोजन की अनुमति देती है। रोबोटिक आर्म तकनीक, जिसमें वास्तविक समय की प्रतिक्रिया शामिल है, सर्जन को हड्डी में कटौती करने से पहले नरम ऊतक तनाव के आधार पर जोड़ को संतुलित करने की अनुमति देती है। एक एकल-सर्जन अध्ययन में, मार्चेंड एट अल ने 100 से अधिक घुटनों के लिए इंट्राऑपरेटिव संतुलन और बोनी रिसेक्शन डेटा को देखा। 11 उन्होंने नोट किया कि सभी प्रीऑपरेटिव योजनाओं को अंतःक्रियात्मक रूप से समायोजित किया गया था, भले ही गठिया रोग की डिग्री या घुटने की विकृति का प्रकार हो। इंट्राऑपरेटिव समायोजन 97% घुटनों में फ्लेक्सन में औसत और पार्श्व अंतराल और 100% घुटनों में विस्तार के बीच 1-मिमी अंतर के भीतर संतुलन प्राप्त करने में सक्षम थे। 12 इसके अलावा, अधिकांश घुटनों को संतुलन के लिए नरम ऊतक रिलीज की आवश्यकता नहीं थी। हड्डी में कटौती करने से पहले संयुक्त संतुलन की भविष्यवाणी करने और घटक की स्थिति को समायोजित करने की क्षमता के परिणामस्वरूप परिशुद्धता के लिए रोबोटिक-सहायता प्राप्त तकनीक के साथ एक संतुलित शोधन तकनीक में वृद्धि होती है।
टीकेए सर्जरी में अच्छे नैदानिक परिणामों को निर्धारित करने में एक और कारक उचित प्रत्यारोपण आकार का उपयोग कर रहा है। हालांकि हमेशा आवश्यक नहीं होता है, प्रीऑपरेटिव प्लानिंग उचित इम्प्लांट आकार का अनुमान लगाने में मदद कर सकती है। आरएटीकेए तकनीक प्रीऑपरेटिव 3 डी सीटी आधारित टेम्पलेट पर आधारित है जो सर्जन को इम्प्लांट आकार की सटीक भविष्यवाणी करने की अनुमति देता है। भिमानी एट अल ने लगातार 54 रोगियों को देखा, जिन्होंने माको आरएटीकेए प्रणाली के साथ आरएटीकेए से गुजरना पड़ा, जिसने प्रीऑपरेटिव इम्प्लांट आकार टेम्पलेट प्रदान किया। इम्प्लांट आकार में परिवर्तन इंट्राऑपरेटिव रूप से किए गए थे जैसे कि ऊरु नॉचिंग से बचना, इम्प्लांट ओवरहैंग से बचना या कम करना, और कॉर्टिकल संपर्क का अधिकतमकरण। अध्ययन से पता चला कि सॉफ्टवेयर ने ऊरु घटकों के 96% और टिबियल घटकों के 89% के सटीक घटक आकार की भविष्यवाणी की, और कोई भी टेम्पलेट 1 से अधिक आकार से बंद नहीं था। 15 इसके अलावा, ऊरु घटक या टिबियल घटक पर नॉचिंग या इम्प्लांट ओवरहैंग के कोई मामले नहीं थे। 15 अन्य अध्ययनों ने मानक रेडियोग्राफ का उपयोग करके इम्प्लांट आकार टेमप्लेटिंग को 43.6% से 68% सटीक दिखाया है, यह समझाते हुए कि अभ्यास आम नहीं है। 16, 17
लगभग सभी नई शल्य चिकित्सा तकनीकों के साथ, आरएटीकेए के साथ एक सीखने की अवस्था है। सोढ़ी एट अल ने आरएटीकेए के साथ सीखने की अवस्था का आकलन किया और पाया कि एक सर्जन कुछ महीनों के भीतर किसी भी ऑपरेटिव समय को नहीं जोड़ने के बिंदु तक तकनीक के साथ सहज हो सकता है। 18
कुछ अध्ययनों ने विभिन्न प्रकार के रोगी-रिपोर्ट किए गए परिणाम उपायों का उपयोग करके पारंपरिक मैनुअल टीकेए की तुलना में आरएटीकेए रोगियों में काफी कम औसत दर्द स्कोर, बेहतर समग्र शारीरिक कार्य स्कोर, अधिक रोगी संतुष्टि और नैदानिक परिणाम, और कम भूले हुए संयुक्त स्कोर की सूचना दी है। 19, 20 यद्यपि इस अपेक्षाकृत नई तकनीक के साथ दीर्घकालिक परिणामों और बड़ी आबादी वाले अध्ययन की आवश्यकता है, प्रारंभिक नैदानिक परिणाम आशाजनक हैं।
उपकरण
इस सर्जरी में उपयोग किए जाने वाले विशेष उपकरणों में स्ट्राइकर द्वारा माको टीकेए सिस्टम शामिल है।
खुलासे
हमारे पास खुलासा करने के लिए कुछ नहीं है।
सहमति का बयान
इस वीडियो लेख में संदर्भित रोगी ने फिल्माने के लिए अपनी सूचित सहमति दी है और वह जानता है कि जानकारी और छवियां ऑनलाइन प्रकाशित की जाएंगी।
References
- संयुक्त राज्य अमेरिका में घुटने के पुराने ऑस्टियोआर्थराइटिस की व्यापकता: तीसरे राष्ट्रीय स्वास्थ्य और पोषण परीक्षा सर्वेक्षण 1991-94 से गठिया डेटा। जे रुमेटील। 2006;33:2271-2279.
- एएओएस कुल घुटने और हिप रिप्लेसमेंट प्रोजेक्शन 2030। http://www.prnewswire.com/news-releases/total-knee-and-hip-replacement-surgery- अनुमान-शो-उल्का प्रकाश-2030-55519727.html। अभिगमन तिथि 17 सितंबर 2019.
- जौरेगुई जेजे, चेरियन जेजे, पियर्स टीपी, बीवर डब्ल्यूबी, इस्सा के, मोंट एमए। कुल घुटने आर्थ्रोप्लास्टी के बाद दीर्घकालिक उत्तरजीविता और नैदानिक परिणाम। जे आर्थ्रोप्लास्टी। 2015;30:2164-6. दोई: 10.1016/ j.arth.2015.05.052.
- इंग्लैंड, वेल्स, उत्तरी आयरलैंड और आइल ऑफ मैन के लिए राष्ट्रीय संयुक्त रजिस्ट्री (एनजेआर) 13 वीं वार्षिक रिपोर्ट। पर उपलब्ध है: https://reports.njrcentre.org.uk/। अभिगमन तिथि 17 सितंबर 2019.
- कंप्यूटर-असिस्टेड सर्जरी और टोटल नी आर्थ्रोप्लास्टी का घूर्णी संरेखण। कुल घुटने आर्थ्रोप्लास्टी 2005 (पीपी 254-257)। स्प्रिंगर, बर्लिन, हीडलबर्ग।
- टिबियल इम्प्लांट का पश्चवर्ती ढलान और यूनिकम्पार्टमेंटल घुटने आर्थ्रोप्लास्टी का परिणाम। जे बोन जॉइंट सर्ग एम। 2004 मार्च; 86 (3): 506-11। दोई: 10.2106/00004623-200403000-00007.
- उलरिच एसडी, सेलर टीएम, बेनेट डी, एट अल। कुल हिप आर्थ्रोप्लास्टी: संशोधन के कारण क्या हैं? आईएनटी ऑर्थोप। 2008;32:597-604. दोई: 10.1007/s00264-007-0364-3.
- हैम्प ईएल, चुगताई एम, स्कोल एलवाई, एट अल। रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी ने मैनुअल तकनीकों की तुलना में योजना बनाने के लिए अधिक सटीकता और सटीकता का प्रदर्शन किया। जे नी सर्ग। 2019;32:239-50. दोई: 10.1055/s-0038-1641729.
- बुकोव्स्की बीआर, एंडरसन पी, ख्लोपास ए, चुगताई एम, मोंट एमए। मैनुअल कुल हिप आर्थ्रोप्लास्टी की तुलना में रोबोट के साथ बेहतर कार्यात्मक परिणाम। Surg Technology Int. 2016;29:303-8.
- मिस्त्री जेबी, एल्मल्लाह आरके, चुगताई एम, ओकटेम एमई, हारविन एस, मोंट एम. लंबे समय तक जीवित रहने और कुल घुटने आर्थ्रोप्लास्टी के एकल त्रिज्या के नैदानिक परिणाम। Surg Technology Int. 2016;28:247-51.
- मार्चंड आरसी, भौमिक-स्टोकर एम, स्कोल एल, रॉड्रिक्ज़ एल रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी के लिए बैलेंस्ड रिसेक्शन सर्जिकल तकनीक। एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड, ऑस्ट्रेलिया।
- मार्चंड आर, भौमिक-स्टोकर एम, स्कूल एल, रॉड्रिक्ज़ एल रोबोटिक-असिस्टेड टोटल घुटने आर्थ्रोप्लास्टी के लिए बैलेंस्ड रिसेक्शन सर्जिकल तकनीक। सार एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड, ऑस्ट्रेलिया।
- गोंजालेज एमएच, मेखाइल एओ। असफल कुल घुटने आर्थ्रोप्लास्टी: मूल्यांकन और एटियलजि। जे एम अकैड ऑर्थोप सुर्ग। 2004;12:436–46. दोई: 10.5435/00124635-200411000-00008.
- हर्नांडेज़-वाकेरो डी, अबाट एफ, सारस्केट जे, मोनलाऊ जेसी। कुल घुटने आर्थ्रोप्लास्टी में मानकीकृत टेमप्लेटिंग के साथ प्रीऑपरेटिव माप की विश्वसनीयता। वर्ल्ड जे ऑर्थोप। 2013;4:287-90. दोई: 10.5312/ wjo.v4.i4.287.
- भीमानी एस, भिमानी आर, फेहर ए, मलकानी ए रोबोटिक-असिस्टेड टोटल घुटने आर्थ्रोप्लास्टी के लिए 3 डी प्रीप्लानिंग सॉफ्टवेयर का उपयोग करके प्रीऑपरेटिव इम्प्लांट साइजिंग की सटीकता। AAHKS 2017 वार्षिक बैठक। 2-5 नवंबर 2017। डलास, टेक्सास।
- कुल घुटने के आर्थ्रोप्लास्टी में एटिगर एम, क्लेसेन एल, पेस पी, कैलीस टी 2 डी बनाम 3 डी टेमप्लेटिंग। घुटने। 2016;23:149-151. दोई: 10.1016/ j.ne.2015.08.014.
- ट्रिकेट आरडब्ल्यू, हॉजसन पी, फोर्स्टर एमसी, रॉबर्टसन ए। कुल घुटने के प्रतिस्थापन में डिजिटल टेमप्लेटिंग की विश्वसनीयता और सटीकता। जे बोन जॉइंट सर्ग बीआर। 2009;9:903-6. दोई: 10.1302/0301-620X.91B7.21476.
- सोढ़ी एन, ख्लोपास ए, पिउजी एनएस, एट अल। रोबोटिक कुल घुटने आर्थ्रोप्लास्टी से जुड़ा सीखने का वक्र। जे नी सर्ग। 2018;31:017-21. दोई: 10.1055/s-0037-1608809.
- मार्चंड आरसी, सोढ़ी एन, ख्लोपास ए, एट अल। रोबोटिक-आर्म असिस्टेड टोटल नी आर्थ्रोप्लास्टी के बाद रोगी संतुष्टि के परिणाम: एक अल्पकालिक मूल्यांकन। जे नी सर्ग। 2017;30:849-853. दोई: 10.1055/s-0037-1607450.
- ऑस्ट्रेलियाई अनुभव माको रोबोटिक टीकेए। एओए वार्षिक बैठक, 8-12 अक्टूबर, 2017, एडिलेड।
Cite this article
माको रोबोटिक-आर्म ने कुल घुटने आर्थ्रोप्लास्टी की सहायता की। जे मेड इनसाइट। 2023;2023(214). दोई: 10.24296/

